
Model of landscape with reinforcement layer

Landscape with porous structure



Section view













Scheme of urban layout based on topology. The arrangement of different functions is represented diagrammatically.
 |
Different spatial situations defining different typologies
|
 |


 |
| Section through the overlaid landscape |

 |




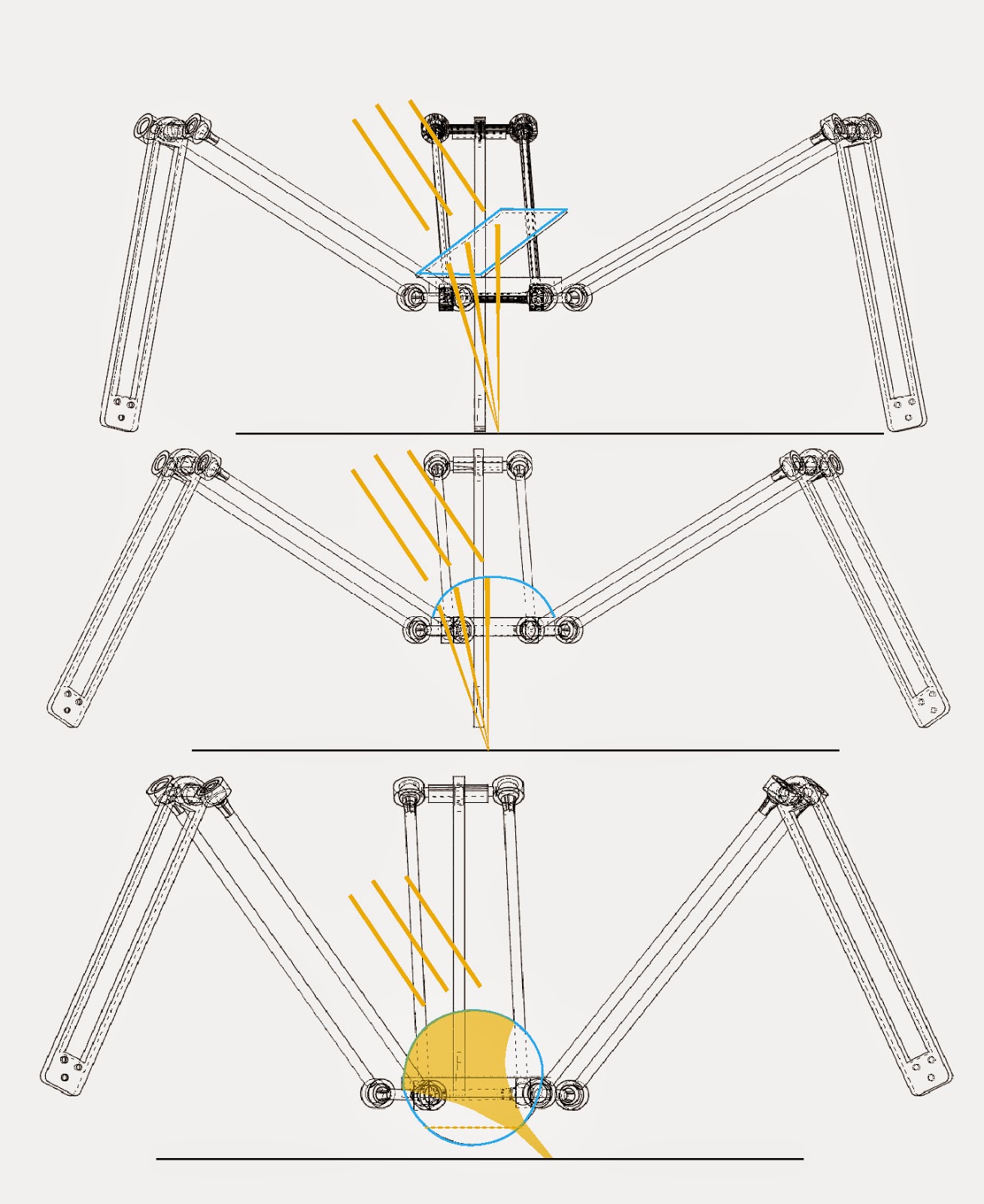
Digital model of delta robot with its maximal work space
 |







 I have tried both ways of printing and I used different types and concentrations of glue. The models below where done by overlaying layers of glue and sand. After the glue dried I removed remaining sand. The whole structure is very porous but also stiff.
I have tried both ways of printing and I used different types and concentrations of glue. The models below where done by overlaying layers of glue and sand. After the glue dried I removed remaining sand. The whole structure is very porous but also stiff.












{kind=link}